In 2016 Vectioneer started a Robot development project in collaboration with Synapticon GmbH. During this project Vectioneer was responsible for developing the robot architecture and the Control System. This resulted in the creation of MOTORCORTEX-Robot, a general purpose Robot Motion Control solution for any type of Industrial Robot or CoBot.
The goal for this project to come with innovative solutions that would make robots more user friendly and more open for interaction from external applications.
MOTORCORTEX has proven its value in both the development process, where is was easy to develop a Digital Twin system that mimics the kinematics and dynamic behavior of the robot and in the production system where access to real-time data of the robot is valuable for testing and scripting.
From the Syman project Vectioneer started testing the Motorcortex-Robot application on different robot arms that allow direct access on their axis over EtherCAT, like the Staubili TX90. Since then multiple Robots have run on the Motorcortex-Robot application.
Project
6-DOF Bot
Client
Synapticon GmbH
What We Did
Robot Architecture and Control System
Transforming Rehabilitation with Technology.
Motorcortex-Robot is a complete application suite for any type of robot. Both Serial Mechanisms (e.g. Anthropomorphic, Scara) as well as Parallel Mechanisms (Hexapods, Delta-robots) are supported. Features include:
- Path planning (cartesian motion, joint motion)
- Forward and inverse Kinematics and Dynamics
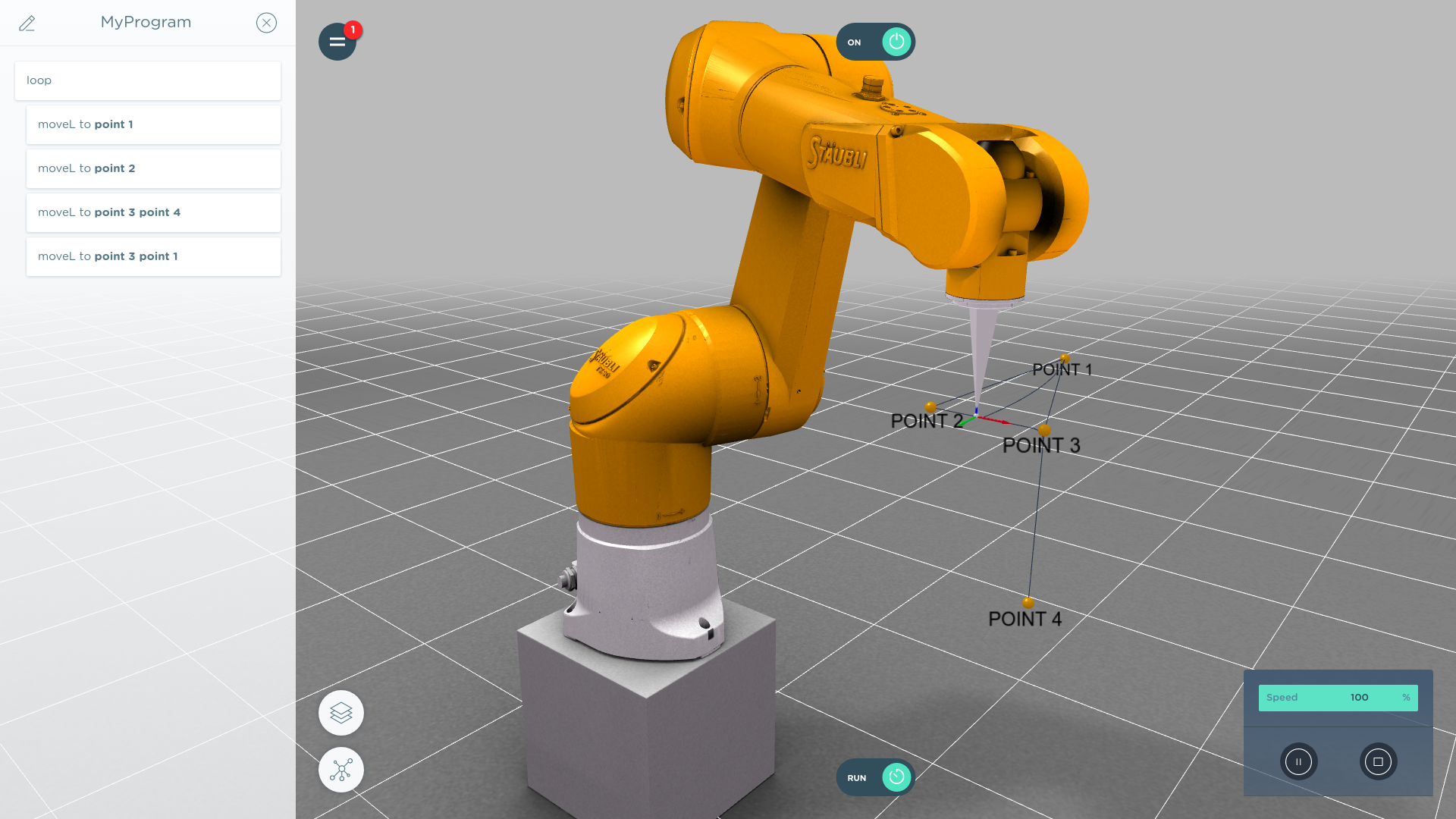
- Motion Programming Language (move commands, set , get , math operators, unlimited variables, flow control (loop, if), triggers)
- User interface (browser-based), so it can run on any modern mult-touch tablet or laptop
- Manual Control (Smooth Jogging)
- Compliance mode (for suitable robot hardware)
- Collision Detection
- Moving Reference Frames (for operation on for instance a conveyor belt)
- Toolchanging
- Palletizing Wizard
- Python, C++, Javascript, C# API
- Motorcortex open data interface (all robot internal data is available through API)
- Data Streaming interface (option), to stream setpoint data in realtime to the robot